Projet : Coupe de France de robotique 2015
Mise à jour 8 septembre 2015
L'association a présenté deux équipes à la coupe de France 2015 : Aventurier et Zoom.
Vous trouverez ici le bilan de cette participation. Pour connaître un peu plus les robots et le sujet, allez faire un tour sur la page de présentation des robots.

Photo de groupe et des robots
Les robots
Aventurier (poster), robot principal de l'association, est victime d'un bug subtile que nous avons eu du mal à identifier et corriger. Il se classe 86e sur 154 équipes homologuées.
{kind=link}
Zoom (poster), robot expérimental, ne parvient pas à marquer avant la fin des homologations. Heureusement, il marque plusieurs points à la fin de la coupe. Cela ne compte pas pour la compétition, mais cela est encourageant pour l'utiliser éventuellement l'année prochaine.
{kind=link}
Résumé
La coupe de France de robotique est finie. L'évènement est toujours populaire puisque 154 équipes ont été en mesure d'homologuer leurs robots. Quelques autres n'ont pas été capables de le faire à temps.
Nous y avons présenté deux robots. Le principal a été homologué et a pu jouer tous les matchs de qualification. Il est classé 86e. Le second robot n'était pas prêt à temps, dû à des problèmes embêtants sur le robot principal que nous avons résolus en premier. Il a néanmoins obtenu le premier niveau d'homologation et était en mesure de marquer à la fin du week-end, mais trop tard.
Malheureusement, nos robots n'ont pas exprimé leur plein potentiel et c'est un peu décevant. Néanmoins, en considérant le peu de temps personnel que nous avions cette année et les dérangements dans le planning, ce n'est pas un si mauvais classement. Nous sommes motivés pour construire de meilleurs robots l'an prochain.
Le gros bug du robot principal était très subtil et a causé de grands désagréments. Nous avons drastiquement amélioré l'asservissement (contrôle du déplacement), mais le bout de code qui vérifie le bon fonctionnement était parfois dupé par cette amélioration et arrêtait le robot. Il s'agit d'un mécanisme de protection qui vise à éviter qu'un moteur ne brûle, que la table ou un robot adverse ne soit dégradé, et d'autres mauvaises choses. Nous avons débogué pendant des heures et avons finalement trouvé la cause et l'avons corrigée. En fait, la bande passante d'un signal monitoré était juste à la limite, de sorte qu'il était parfois déphasé au point que la protection s'activait.
Le second robot était celui de la basse énergie. Nous avons passé moins de temps que nous aurions voulu et avons été pris dans de mauvaises pistes pendant le développement. Mais à la fin du week-end, nos deux robots ont joué un match l'un contre l'autre : le second robot a marqué 9 points (l'autre 29 points). Nous allons probablement continuer à l'améliorer lentement et espérons que les règles de l'an prochain auront des actions qu'il pourra jouer.
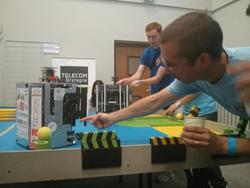
Amélioration constante
Nous nous interdisons de modifier le cœur du code (à l'exception du déverminage) pendant l'évènement, mais il y a tout de même des choses à améliorer : fin de la mise en commun, optimisation des trajectoires, ajustement de la stratégie, réparation des pièces cassées... Lorsque le robot principal nous laissait du répit, nous continuions à développer le second robot.
Sur les photos, nous voyons Romain travailler sur le robot (principalement sur les élévateurs pour empiler des éléments qui ont cassé plusieurs fois à cause de collisions), Germain relisant la stratégie sur PC, Valère et Gaëlle aidant le second robot à vivre.





Notre stand est visité
Malgré notre classement moyen, nos robots sont très attrayants. Les visiteurs et quelques équipes s'arrêtent à notre stand. Comme d'habitude, nous expliquons comment nos robots fonctionnent et répondons à leurs questions. Cette année, nous avons eu beaucoup de questions spontanées à propos de nos sponsors et leurs produits. La qualité générale du robot principal, et de sa mécanique en particulier, était souvent félicitée.


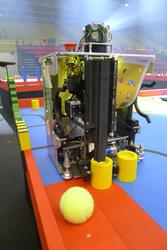
Avant les matchs, les homologations
Les arbitres examinent nos conceptions avant les matchs. Ils vérifient que nous respectons les contraintes du règlement, que le robot n'est pas dangereux pour le public (puissance des lasers, arrêt coup‐de‐poing, bords coupants...), s'il est capable de marquer sans adversaire et si le système d'évitement fonctionne.
Notre robot principal a été homologué juste à temps pour jouer dès la première série (il ne restait que quelques vérifications, mais la queue est longue), tandis que le second robot a été partiellement homologué puisqu'il n'a pas été capable de marquer des points avant la fin des homologations.
Sur les photos, nous voyons Romain et Germain décrire notre robot aux arbitres, Gaëlle attendre pour l'homologation du second robot, le robot principal (sans le second ascenseur) qui a marqué 12 points aux homologations.


Mini robot pour la coupe off

Pour décompresser, les participants s'organisent une coupe off avec différents challenges non officiels. Germain a construit un petit robot fait d'objets hétéroclites présents sur le stand, et contrôlé à distance avec son téléphone.
Le robot était inscrit pour la "course", dont le principe est de terminer un tour de circuit avec un robot habituellement rigolo.
Germain pilotait discrètement avec son mobile. Le robot semblait chercher son chemin de manière autonome et il était drôle de voir les gens encourager le petit robot qu'ils pensaient être indépendant.
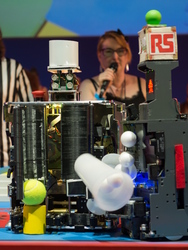
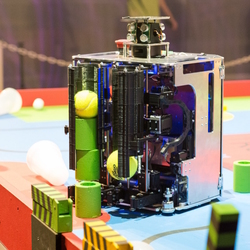
Couleurs

Depuis longtemps, nous voulions ajouter des effets de couleurs décoratifs dans le robot. Maintenant, c'est fait... et whoh, c'est un incroyable débogueur d'I.A. ! Changer la couleur sur évènement aide à comprendre ce qu'il se passe dans sa "tête".
Coopération
Même si c'est une sorte de compétition, le premier but de l'évènement est l'apprentissage. De plus, puisque de nombreux bons robots mènent à un meilleur spectacle, nous tentons d'aider des équipes quand nous pouvons.
Par exemple, nous avons donné à l'équipe CSARR une carte que nous avons conçue pour démarrer rapidement avec sa nouvelle carte BeagleBoneBlack... et nous avons trouvé notre logo sur leur poster !
Pendant l'évènement, une équipe a cassé sa carte Linux embarqué. Nous l'avons aidée à la réparer en ressoudant quelques petits composants. Un autre bon exemple de notre implication est ce moment au milieu de la nuit où Valère improvisa un cours sur les PWM sur un coin d'une table de test pour expliquer à une équipe pourquoi ils ont eu les problèmes dont ils ont parlé et comment les résoudre pour l'an prochain.



Hollywood
Nous ne pouvons pas terminer la page sans quelques photos du robot sur scène.





Vidéos
Mécénat








