Projet : Coupe de France de robotique 2012
Voir la fiche de présentation (PDF)
Mise à jour 21 mai 2012
Présentation
L'association a pour projet principal cette année de réaliser deux robots totalement différents, pour les faire concourir à la coupe de France de robotique.
L'équipe impliquée sur ce projet est composée d'ingénieurs nouvellement diplômés, de futurs ingénieurs et d'étudiants en BTS. Opérant dans différents domaines, de la communication graphique à l'intelligence artificielle en passant par l'informatique, la mécanique et l'électronique embarquée, ces jeunes entre 19 et 24 ans ont décidé de mettre en commun leurs compétences tout en apprenant des autres et en expérimentant des technologies qu'ils ne connaissent pas.
L'objectif est d'approfondir les connaissances à travers la réalisation de robots, en vue de restituer ces informations vers un public plus large dans les années futures.
La Coupe de France

La Coupe de France de Robotique est un défi ludique, scientifique et technique de robotique amateur. Elle est coorganisée chaque année par la ville de La Ferté-Bernard et l'association Planète-Sciences lors du festival ARTEC (Arts et Technologies).
Les participants doivent concevoir puis réaliser un robot totalement autonome (énergie et autopilotage) conforme au règlement et apte à participer aux matchs. Sur la photographie de droite, nous voyons les tables de rencontre sur la scène.
Le concours s'adresse à des équipes de jeunes passionnés de robotique ou des équipes ayant un projet éducatif vers les jeunes. Une phase d'homologation, une phase qualificative puis une phase finale par élimination directe composent le concours. Les matchs se réalisent avec deux équipes face à face sur la table de jeu. Cette rencontre permet de nombreux échanges de savoirs et savoir-faire entre les participants.
Les deux premières équipes françaises, et une équipe ayant reçu un prix spécial rencontreront leurs homologues internationaux au cours de la finale d’Eurobot Open.
Thématique
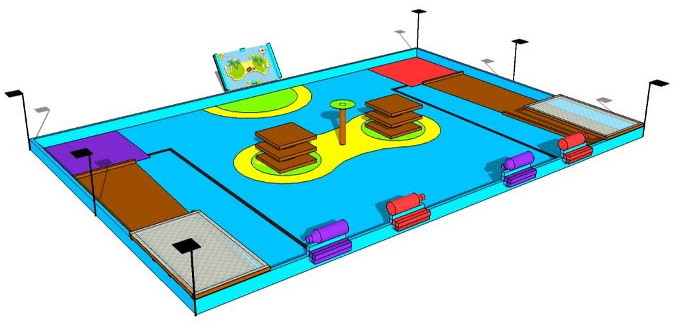
En 2012 pour sa dix-neuvième édition, la Coupe de France de Robotique sera sur le thème de l'île au trésor. (logo à gauche)
Sur la table de jeu ci-dessous, les robots vont tenter de conquérir les mers en récoltant les trésors dispersés : lingots, pièces d'or, carte au trésor, ou encore messages en bouteille. Ces objets sont symbolisés par des éléments de jeu que les robots devront manipuler.
Robots
Nous réalisons deux robots de conception totalement différente.
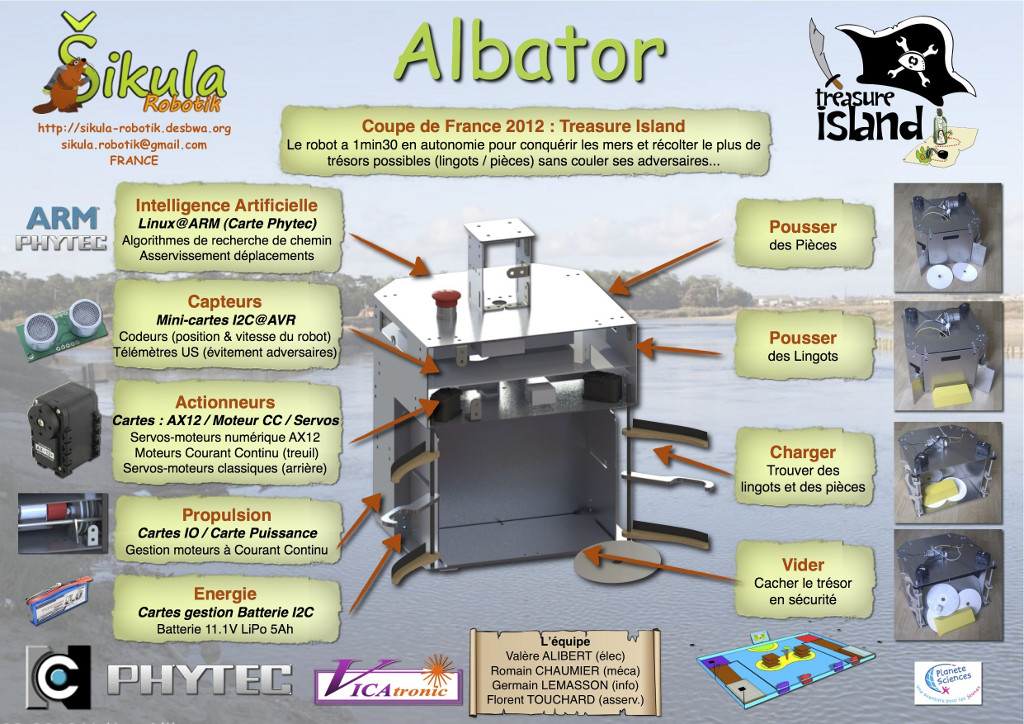
Albator est le nom donné au robot régulier de l'association. Il recueille les plus gros efforts et servira de plateforme pour les années futures.
Zabulbo est un second robot présenté par l'association. Il fait figure de robot expérimental.
Posters techniques

Méthode

Une des particularités de notre équipe est qu'aucun de ses membres n'est situé géographiquement au même endroit. Malgré cela, nous comptons réaliser un robot relativement performant grâce à une méthode de travail et des outils adaptés.
Nous avons par exemple réalisé un simulateur qui nous permet de développer l'aspect logiciel et stratégique sans dépendre de la réalisation physique du robot, en attendant la phase d'intégration. De plus, il est muni d'une interface graphique, dont une vidéo est proposée ci-dessous, pour une utilisation conviviale.
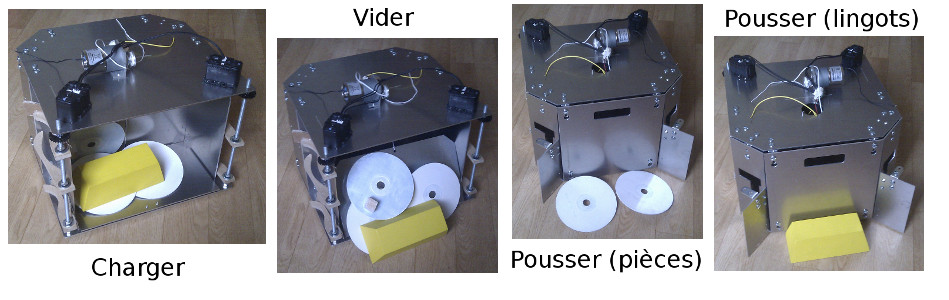
Par ailleurs, la réalisation de prototypes simplifiés permet de valider des idées et ajuster les concepts afin d'avoir un système fonctionnel au final. C'est le cas du système de ramassage par exemple dont le prototype est visible ci-contre.
Le robot passe des essais de validation tout au long de son processus de création.
Simulateur en action
Essai de vidage des totems
Coupe du Trégor
Nous avons participé à la coupe du Trégor. Il s'agit d'une rencontre amicale à Lannion où les équipes présentent leur robot et échangent des idées.

Laboratoire

Nous réalisons un second robot expérimental. Ce robot-laboratoire qui n'a pas d'autre objectif que de disputer des matchs (donc avoir été homologué auparavant) est l'occasion d'essayer des technologies ou des procédés inhabituels.
Dans la lignée de ses prédécesseurs "(French) Kiss" et "Gringalet" réalisés au sein d'une autre association, Zabulbo a pour vocation d'être un robot simple conçu et réalisé dans un délai court : moins d'un mois.
Avec ce nouveau défi, nous allons de plus expérimenter en particulier l'utilisation de moteurs triphasés brushless dans un petit robot. Le moteur en question est illustré ci-contre.
Mécénat



