Projet : Coupe de France de robotique 2018
Mise à jour 20 février 2019
L’association a présenté un robot à la coupe de France 2018 : Acropole. Il termine 35ème sur 133 équipes homologuées.
Vous trouverez ici le bilan de cette participation. Pour connaître un peu plus le robot et le sujet, allez faire un tour sur la page qui leur est consacrée.

Photo de groupe à la fin de la coupe
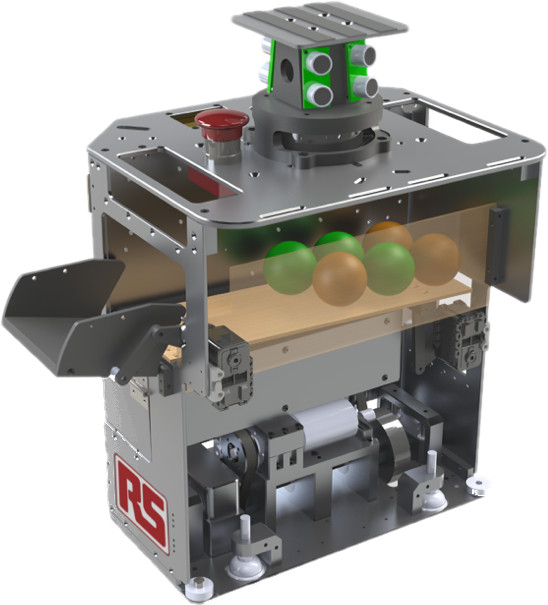
Le robot
Retrouvez le robot Acropole et son poster technique ci-dessous.

Rétrospective
Arrivée — mardi et mercredi
Les membres de l’équipe arrivent de toute la France, et de Belgique, entre le mardi 8 mai en début d’après-midi et le mercredi midi. Romain, Valère, Yannick, Germain, Florent, Wojciech et Léopold sont présents, tandis que Gaëlle n’a pas pu venir.
Nous sommes très en retard sur le planning, en partie à cause de plusieurs déménagements qui ont occupé certains membres cette année. Nous profitons donc de ce jour arrivé « en avance » pour mettre en commun chacune de nos parties de robot : nous assemblons les derniers éléments mécaniques, calibrons le robot et réglons les capteurs.
Heureux hasard, l’hôte chez qui nous avons réservé notre hébergement est rédacteur en chef du magazine Planète Robots : nous avons un accueil exceptionnel, immergés au pays de la robotique !
Nous pouvons déployer notre table de jeu dans le salon, et ainsi avoir un espace pour effectuer des tests au calme, en retrait de l’effervescence qui règne sur le lieu de la coupe. Cela nous permettra par la suite de composer un équilibre entre une présence sur le lieu de l’évènement et des tests dans une ambiance plus intime.
Notre hôte démarre la semaine avec un tweet qui annonce la couleur : « La @CoupeRobotique de France et d’Europe démarre demain à @LRSY_ville. Pur hasard, une équipe a pris un #AirBnB chez nous. Du coup, le salon devient un espace d’entraînement pour le #robot de l’équipe @SikulaRobotik :). » Frédéric Boisdron (@scr33tch).

Photo accompagnant le tweet
Une partie de l’équipe va gérer l’inscription à la compétition pendant que les autres poursuivent la préparation du robot pour l’homologation.
Homologation — mercredi
L’homologation est l’étape cruciale pour être admis à participer aux matchs. Les arbitres vérifient des caractéristiques statiques du robot (taille, non-dangerosité, etc.) et valident qu’il peut marquer au moins un point sans adversaire et qu’il dispose d’un système d’évitement des robots adverses fonctionnel.
Sereins, quelques membres patientent pour aller faire homologuer notre robot. Il est homologué du premier coup vers 18h30 avec une réserve toutefois : nous ne retrouvons pas l’étiquette à coller sur le robot pour identifier le numéro d’équipe. Merci à l’organisation de nous en avoir réimprimé un.
Une fois homologué, nous avons un peu de temps avant les premiers matchs. Nous en profitons pour travailler sur l’abeille (petit robot mécanique déclenché par le robot principal) et améliorer sa fiabilité. Le lendemain, elle sera passée d’un prototype fonctionnel à un système véloce et redoutable.

Nos mécaniciens en réflexion intense sur l’abeille
Match 1 — jeudi matin
Notre robot marque seulement 32 points et notre adversaire AIR Robotique en marque 33. Au classement provisoire, nous sommes 53ème sur 93 équipes homologuées.
En relisant les enregistrements du robot pendant le match, nous nous apercevons qu’il a détecté des surcharges lors des premiers déplacements et une détection fantôme sur le LIDAR (le télémètre laser rotatif, sorte de radar en laser infrarouge). Pour palier à la première observation, nous réduisons l’agressivité du robot car il est souvent plus raisonnable de ralentir pour garantir la précision et la répétabilité (qui sont sources de points) plutôt que de prendre des risques et ne pas être fiable.
Match 2 — jeudi après-midi
Nous rencontrons Unitec-UTBM qui marque 125 points tandis que nous en mettons 85 points. Au classement provisoire, nous sommes 40ème sur désormais 110 équipes homologuées.
La correction de midi a porté ses fruits, néanmoins le panneau domotique n’a toujours pas été allumé. Il s’agit d’un panneau lumineux que nous devons allumer en activant un interrupteur domestique sur le bord de la table. Le robot manque un peu de précision, probablement que le réglage de mardi soir lors de l’intégration a été fait trop rapidement.
Robot prêt pour le match 2, juste avant le départ
Match 3 — vendredi matin
Le robot joue contre ARFIT qui marque 154 points alors que nous n’arrivons à placer que 35 points. Au classement provisoire, nous sommes descendus 51ème sur 119 équipes homologuées.
Le robot s’est à nouveau arrêté plusieurs fois pendant le match. Cette fois, c’est complètement à cause du LIDAR croyant voir des adversaires. Le robot est néanmoins assez robuste puisqu’il a réussi à reprendre à chaque arrêt inopportun, mais le temps perdu l’a empêché de faire toutes les actions prévues.
Le capteur d’évitement, est complètement défaillant : nous envisageons d’améliorer le filtrage, mais en regardant les données brutes, nous avons du mal à voir le moindre signal et lorsque celui-ci est présent il raconte n’importe quoi assez souvent. C’est presque étonnant que le filtre rudimentaire ait réussi à avoir autant de données justes malgré tout.
La décision est prise de passer sur le système de secours à base de télémètres à ultrasons. Bien que sensible aux capteurs de même nature s’ils sont présents sur l’adversaire voire à une autre table, cela vaut mieux qu’un système totalement défaillant. L’opération se fait dans l’urgence du prochain match, en remplaçant des systèmes qui n’avaient pas été prévus pour être modifiés facilement. Valère réalise l’opération à cœur ouvert.
Match 4 — vendredi après-midi
L’ange gardien vient chercher l’équipe alors que le robot refuse de démarrer : plantage de l’intelligence. Yannick a la bonne idée d’envoyer Valère en arrière-scène où nous avons un peu de temps dans la file d’attente pour ajuster le programme avant de passer sur scène. Assisté à distance de Florent réveillé pendant une sieste méritée au gîte, il finira par faire démarrer l’intelligence avec le bon fonctionnement juste avant le match.
Nous jouons contre WeRdroid qui marque 150 points tandis que nous en marquons 126 points. Au classement provisoire, nous sommes remontés 42ème sur 130 équipes homologuées.
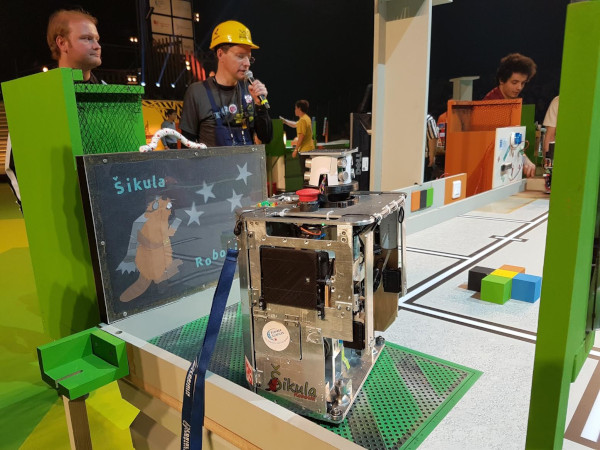
Le robot a presque réussi à faire tout ce qui avait été préparé. Cette fois-ci, l’abeille et le panneau domotique ont été activés. D’ailleurs Gaëlle, qui n’avait pas pu venir, a eu le plaisir de voir à la WebTV le panneau domotique dont elle s’était majoritairement occupé s’illuminer.

Robot à la fin du match 4, le panneau domotique (avec le castor du logo de l’association) est allumé et animé
Coupe OFF et nuit difficile — vendredi soir & nuit
Le vendredi soir, c’est la Coupe OFF. L’occasion de prendre un peu de temps pour discuter avec les amis qu’on s’est faits et qu’on retrouve chaque année à la coupe et faire des robots improvisés et autres joyeusetés.
La soirée débute en musique avec un barbecue géant où toutes les équipes sont invitées par l’équipe Evolutek, puis se poursuit avec la coupe OFF un moment de détente amusant avec une bonne ambiance. Nous présentons notre panneau domotique au concours de beauté mais un autre est élu. Germain construit également un petit robot pour la «course» mais ayant oublié son matériel le robot fait de récupérations ne parvient pas à se déplacer : les fils sont trop lourds.
Après la soirée, certains membres souhaitent améliorer le programme ; mais pendant les manipulations, le comportement du robot devient tout à coup très étrange. Nous décidons alors d’essayer de régler à nouveau le déplacement mais nous devons nous rendre à l’évidence : le problème est plus profond. Nous changeons la carte puissance, il y a un léger mieux, mais il a toujours 40% de vitesse en moins que d’habitude.
L’équipe part se coucher mais deux membres restent pour expertiser le robot. À bout d’hypothèses et très fatigués, ils ont fini par limiter la fougue des déplacements demandés aux moteurs, en respectant le programme déjà un peu améliorer et en le modifiant légèrement pour limiter les dégâts.

Léopold fait barrage de son corps au cas où le robot fasse n’importe quoi pendant les réglages (phase pendant laquelle les sécurités doivent être désactivées)
Match 5 — samedi matin
Nous jouons contre UXSCBotmoiselle qui marque 60 points tandis que nous en marquons 126. Nous finissons alors 35ème sur 133 équipes homologuées à la fin des phases qualificatives.
L’équipe de lycéennes du lycée français de Madrid refuse de recevoir nos balises. Pour qu’elles ne terminent pas avec un forfait, nous acceptons de jouer le match avec un évitement dégradé. Cela leur permet de marquer pour la première fois des points avec un de leurs systèmes du robot. Grande joie chez nos adversaires.
C’est un bon match pour nous aussi compte tenu des problèmes rencontrés pendant la nuit. Notre robot va d’abord déclencher avec succès l’abeille pour qu’elle butine la fleur (ballon est percé), puis construit quelques habitations (cubes poussés dans la zone de construction), allume le panneau domotique à l’aide de l’interrupteur puis ouvre le distributeur d’eau (balles de notre couleur) pour alimenter la ville. Il n’a pas le temps d’aller chercher l’eau à nettoyer chez l’adversaire.
Finales et eurobot — samedi après-midi & soir
Nous ne sommes pas qualifiés pour les phases finales, mais cela ne nous empêche pas de profiter du spectacle. De plus, la finale européenne a lieu dans la soirée, ce qui fait un bonus de matchs à regarder.
Pendant la finale européenne, les grandes lignes du règlement de l’année prochaine sont présentées. Valère qui participe à la commission règlement est présent sur scène. Le thème de l’an prochain sera : Atom Factory !
Videos
Vidéos de deux matchsEt après ?
Compte tenu des problèmes que nous avons eus pendant la coupe, il va falloir revoir certains points. La liste est longue, et il est loin d’être certain que nous arriverons à tout faire :
- Trouver un partenaire pour usiner des pièces métalliques pour les évolutions du robot
- Déterminer la cause de la perte de puissance. Ce peut être un câblage usé (les câbles ont 6 ans et sont soumis à de fortes vibrations), une défaillance de la carte moteur ou encore par exemple la fin de vie de nos moteurs (espérons que cette hypothèse ne se révèle pas valide)
- Régler le problème d’évitement : fabriquer un capteur d’évitement avec de meilleures technologies ou trouver un partenaire nous acheter un capteur de qualité
- Régler le problème d’énergie en concevant une nouvelle carte qui rassemblera les fonctions de gestion d’énergie actuellement répartie sur 3 cartes électroniques différentes : moins de câbles = moins de risques, plus puissantes = moins de risque de surchauffe, meilleure séparation des éléments consommateurs d’énergie
- Fabriquer de nouvelles roues ayant une meilleure adhérence, avec des bandes de caoutchouc naturel données par l’équipe de l’IUT de Toulon (la coopération est de mise à la coupe de robotique)
- Mieux nous former entre nous au sein de l’équipe
- Préparer les animations de la rentrée (par exemple, la fête de la science)